相关文章

《云原生安全攻防》-- 构建云原生攻防场景
在本节课程中,我们将学习云原生攻防场景的构建。为了研究云原生安全攻击案例,我们需要搭建一个云原生攻击测试环境,以便进行攻防研究和攻击手法的复现。 在这个课程中,我们将学习以下内容: 构建云原生攻防场景…
建站知识
2024/12/12 12:22:06

高质量英文文献应该如何查找并且阅读?
1. 查找
使用谷歌学术进行论文关键字检索,查找高度匹配的论文。这里我们可以选择年限等信息进行筛选。作为研究者我们一般选择近三年的文章进行阅读。这里谷歌学术需要科学上网,请大家自行解决。
https://scholar.google.com/ 2. 查看期刊等级
我们查…
建站知识
2024/11/28 10:47:42

在抖音做电商,没有货源,不懂直播怎么办?分享一种解决方案!
大家好,我是电商糖果
糖果做电商的时间也挺久了,天猫,京东,闲鱼都搞过。
从学校进入社会工作,创业,一直都是围绕电商打转。
做的时间久了,好像只会做这一件事儿了。 2020年开始专攻抖音小店&…
建站知识
2024/12/21 1:57:49

腾讯混元文生图模型HunyuanDiT部署体验
最近,腾讯混元文生图模型HunyuanDiT 架构升级,并免费开源了。他采用的神经网络架构和Sara一样都是Diffusion Transformer,参数量已经达到15亿。官方测评效果显示超过目前开源的Stable Diffusion。试用下来效果比较令人惊喜。 建议硬件要求&am…
建站知识
2024/12/5 11:58:50

Java:使用BigDecimal、NumberFormat和DecimalFormat保留小数
一、代码和调试结果
1.1 BigDecimal 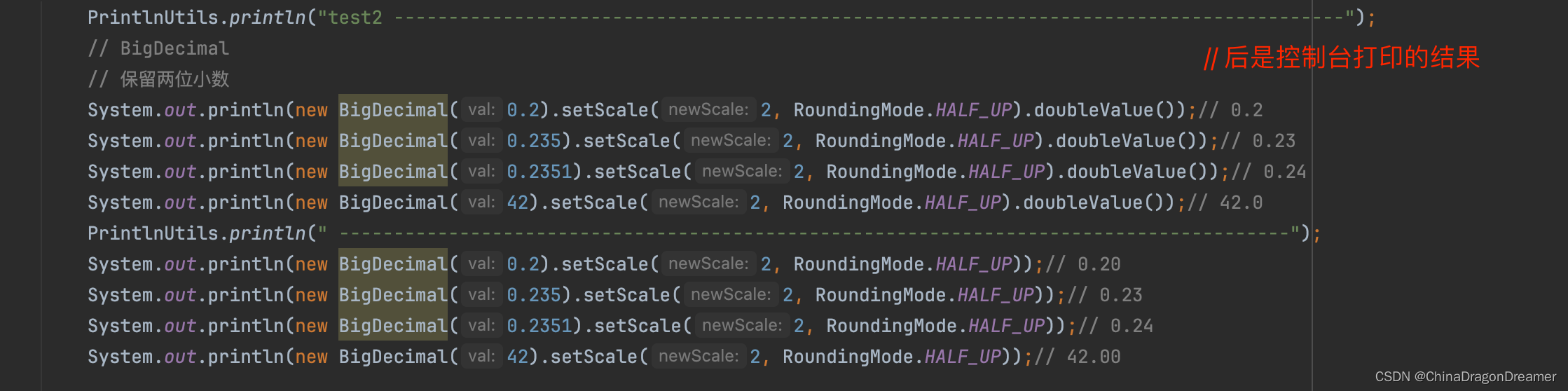 1.2 DecimalFormat 1.3 NumberFormat 二、原代码
BigDecimalUtil.java 代码
package utils;import java.math.BigDecimal;
import jav…
建站知识
2024/11/17 4:04:55
【Linux之升华篇】Linux内核锁、用户模式与内核模式、用户进程通讯方式
文章目录 Linux 中主要几种内核锁Linux 中的用户模式和内核模式申请大块内核内存用户进程间通信的几种方式通过伙伴系统申请内核内存的函数Linux 虚拟文件系统的关键数据结构对文件或设备的操作函数的数据结构Linux 中的文件创建进程的系统调用调用 schedule()进行进程切换的方…
建站知识
2024/11/30 15:04:30

ROS 手眼标定 realsense435i+ur5e
手眼标定的原理
基坐标系(base_tree)和相机(camera_tree)两个坐标系属于不同的tree,通过将标签贴到手上,相机识别出标签的position和orention,并通过easy_handeye标定包得到tool0(机械手)&…
建站知识
2024/12/21 3:59:51

